CAN接口控制板軟件設(shè)計
文章出處: 責(zé)任編輯:正航儀器 發(fā)表時間:2014-11-03CAN接口控制板的卞要功能有:定時采集溫度數(shù)據(jù)并通過CAN總線發(fā)送至工控機;收到工控機的升溫、降溫指令后,根據(jù)預(yù)定的算法控制加熱與制冷裝置的啟動、因此,除硬件設(shè)計外,我們還需編寫PIC12C672中片機的程序,以實現(xiàn)上述CAN接口控制板的功能)采用匯編語言編程,使用福州貝能的PICRICE仿真器進行開發(fā)、調(diào)試,并用PICSTART PLUS編程器燒寫程序)中片和L的卞程序流程圖如圖4所示:
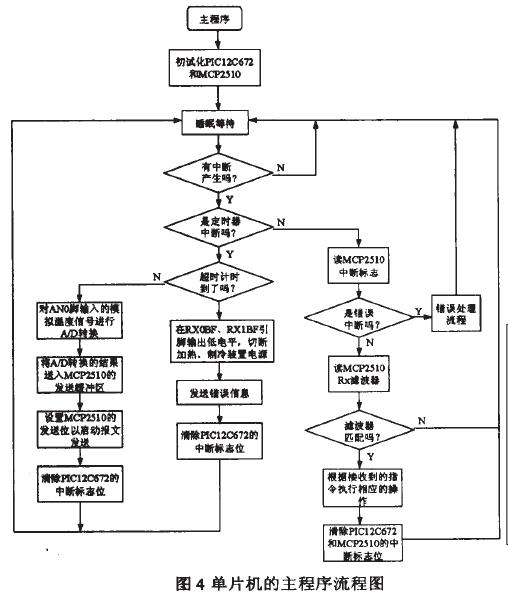
PIC12C672的初始化卞要完成I/O腳的配置,定時器中斷的設(shè)置,以及A/D轉(zhuǎn)換模塊的設(shè)置)MCP2510的初始化的卞要是將總線時鐘頻率設(shè)為125k飾、,配置中斷信號,將TXORTS,TXIRTS,TX2RTS配置成通用的輸入腳,將RXOBF,RXIBF配置成數(shù)字輸出腳)MCP2510的發(fā)送操作通過三個發(fā)送緩沖器來實現(xiàn),這三個發(fā)送緩沖器各占據(jù)14個字節(jié)的SRAM)字節(jié)是控制寄存器TXBNCTRL,該寄存器里的內(nèi)容設(shè)定了信息發(fā)送的條件,且給出了信息的發(fā)送狀態(tài),至第六字節(jié)用來存放標準的和擴展的標識符以及仲裁信息,最后八個字節(jié)用來存放待發(fā)送的數(shù)據(jù)信息。
MCP2510的接收操作通過三個接收緩沖器來實現(xiàn),在三個接收緩沖器中,MAB(報文集成緩沖器)總能夠接收來自總線的下一條報文,其余兩個接收緩沖器RXBO和RXB1則從協(xié)議引擎接收完整的報文)MAB對接收到的報文進行組合,并將滿足驗收濾波器條件的報文傳送到至RXBN緩沖器,并且該接收緩沖器對應(yīng)的CANINTF.RXNIF位將置1,器件會在INT引腳產(chǎn)生一個中斷,顯示接收到有效報文。
http://m.czksngs.com
精選文章
三臺環(huán)境試驗設(shè)備發(fā)貨武漢汽車空調(diào)零部件老客戶公司
三箱式冷熱沖擊試驗箱順利發(fā)貨至國網(wǎng)福建省電力局單位
水冷式冷熱沖擊試驗箱順利發(fā)往深圳,助力老客戶技術(shù)升級
定制水冷式冷熱沖擊箱成功出貨至東莞東坑絕緣導(dǎo)電材料客戶公司
水冷兩箱式冷熱沖擊試驗箱送貨惠州客戶公司
溫濕度試驗箱,發(fā)貨山東德州做光無源器件客戶公司
冷熱沖擊試驗箱、快速溫變試驗箱,恒溫恒溫試驗箱交機美國Sig
正航假期通知:端午寄情的金色六月節(jié)
PCT高壓加速老化箱散熱水塔發(fā)貨浙江客戶公司
冷熱沖擊試驗箱與恒溫恒濕試驗箱:助力江蘇PCB與FPC線路板
